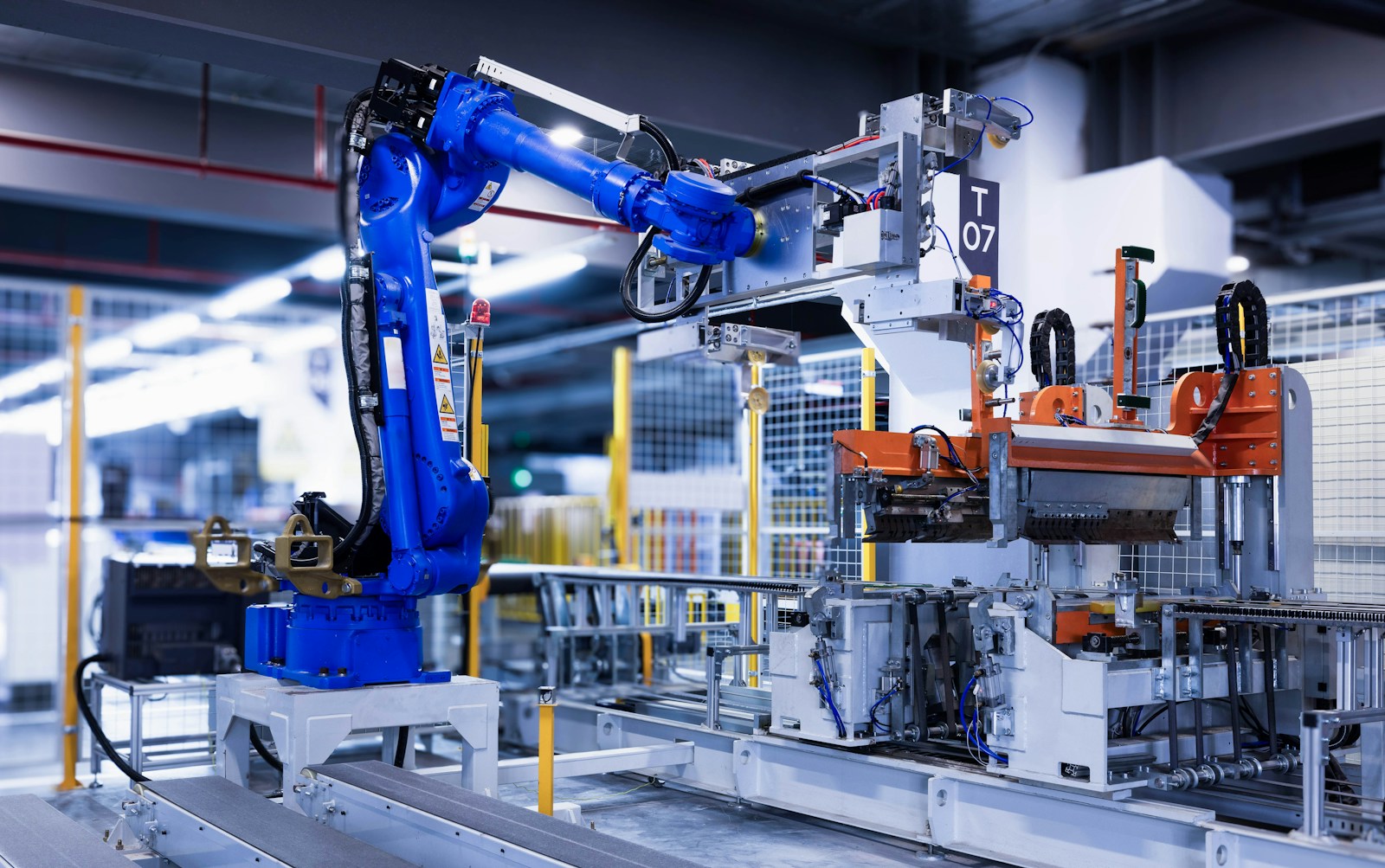
Nelle foto delle linee produttive moderne c'è sempre qualcosa che colpisce subito lo sguardo file di
bracci robotici arancioni, gialli, bianchi che si muovono con una precisione coreografica. Saldate, assemblano, spostano, incollano, controllano, senza mai fermarsi. Capire che cosa sono, come funzionano e perché sono ovunque nelle fabbriche significa entrare nel cuore dell'automazione industriale contemporanea.
Che cosa sono i bracci robotici in ambito industriale
Con braccio robotico si intende un
manipolatore meccatronico programmabile, progettato per muovere un utensile o un organo di presa nello spazio con precisione ripetibile. Nella definizione della
International Federation of Robotics, rientra nella famiglia dei robot industriali, allo stesso modo di strutture cartesiane, SCARA o robot antropomorfi.
A differenza di un semplice nastro trasportatore, il braccio robotico ha più gradi di libertà ruota, si estende, si inclina, afferra. È pensato per sostituire o affiancare il braccio umano in compiti ripetitivi, pesanti o pericolosi, mantenendo una precisione che non conosce stanchezza. È questo mix di forza, accuratezza e programmabilità che lo ha reso protagonista di migliaia di linee produttive.
Struttura meccanica tra giunti, assi e cinematica
Alla base di un braccio robotico c'è una struttura fatta di
segmenti rigidi collegati da giunti. Ogni giunto rappresenta un asse controllato, azionato da motori elettrici o, nei sistemi più particolari, da attuatori pneumatici o idraulici. Un robot a sei assi, per esempio, ha una mobilità paragonabile a quella di un braccio umano con spalla, gomito e polso.
La disposizione dei giunti definisce la
cinematica del robot. I modelli antropomorfi puntano alla massima flessibilità nello spazio, quelli SCARA privilegiano movimenti rapidi su un piano con un asse verticale, mentre i robot cartesiani scorrono su guide lineari X Y Z. Ogni architettura porta con sé compromessi tra area di lavoro, velocità, carico utile e complessità di controllo.
Motori, sensori e controllo di movimento
Dentro ciascun giunto lavora un attuatore controllato con estrema finezza. I
motori brushless di ultima generazione, accoppiati a riduttori di precisione, permettono di ottenere coppie elevate su movimenti controllati al decimo di grado. Encoder e sensori di posizione restituiscono al controller la situazione esatta del braccio in ogni istante.
Al centro del sistema c'è un controller che esegue in tempo reale algoritmi di servo controllo, trasformando traiettorie e comandi ad alto livello in correnti sui motori. I grandi produttori, da
ABB Robotics a
KUKA, fino a
FANUC, offrono piattaforme proprietarie in cui il linguaggio di programmazione del robot dialoga con questi controlli di basso livello.
Come si programma un braccio robotico
Programmare un braccio robotico significa insegnargli
posizioni e traiettorie da seguire. Il metodo più classico è la programmazione "teach pendant", in cui l'operatore sposta manualmente il braccio in posizioni chiave, che vengono memorizzate come punti del percorso. A questi si aggiungono istruzioni logiche, condizioni, tempi di attesa, interazioni con altri dispositivi.
Negli ultimi anni si sono diffuse anche interfacce grafiche più intuitive e approcci di programmazione offline, in cui percorsi e cicli vengono definiti su software di simulazione e poi scaricati sulla macchina. Alcuni sistemi, soprattutto nel mondo dei
cobot collaborativi, sfruttano la guida manuale diretta il braccio viene preso e mosso a mano, mentre i sensori registrano il percorso da replicare.
End effector e integrazione nelle celle robotizzate
Il braccio, da solo, non fa nulla. Il vero lavoro avviene all'estremità, nell'
end effector. Può essere una pinza meccanica, un sistema di vuoto, una torcia di saldatura, una testa di incollaggio, un utensile di sbavatura, uno strumento di misura. Proprio la flessibilità nel cambiare end effector rende il braccio robotico un investimento adattabile a più fasi di processo.
Nelle celle robotizzate industriali il braccio dialoga con nastri, sensori, sistemi di visione, PLC, barriere di sicurezza. La progettazione di queste celle è un mestiere a sé, che deve tenere insieme produttività, sicurezza e manutenzione. Molti produttori offrono librerie di funzioni per semplificare l'integrazione con i sistemi di controllo di linea e con i software di supervisione.
Dai robot tradizionali ai cobot collaborativi
Per decenni i bracci robotici sono stati confinati dietro recinzioni e barriere fotoelettriche, separati fisicamente dagli operatori. La priorità era evitare ogni contatto tra uomo e macchina. Con l'arrivo dei
robot collaborativi, o cobot, si è iniziato a esplorare un nuovo equilibrio. Questi bracci, spesso più compatti, integrano sensori di coppia, limiti di velocità e logiche di sicurezza che permettono un lavoro più vicino alle persone.
Produttori come
Universal Robots hanno spinto soprattutto su facilità di programmazione e su scenari in cui il robot non sostituisce l'operatore, ma lo affianca in compiti ripetitivi o di precisione. In molti casi la vera sfida non è tecnologica, ma organizzativa ripensare i flussi di lavoro per sfruttare davvero questa collaborazione.
Perché i bracci robotici sono ovunque nelle fabbriche
La presenza massiccia di bracci robotici nelle fabbriche non è solo una questione di moda tecnologica. È il risultato di anni di evoluzione su tre fronti fondamentali affidabilità, costi e flessibilità. I robot industriali moderni raggiungono livelli di disponibilità che rendono sostenibile farli lavorare su tre turni, tutti i giorni, per anni. I costi, pur restando importanti, si sono resi più accessibili grazie alle economie di scala.
In molti settori automotive, elettronica, logistica la pressione su qualità e tempi di consegna rende difficile fare a meno di una automazione spinta. I bracci robotici permettono di standardizzare fasi delicate, ridurre errori, misurare in modo fine il tempo ciclo. Non è un caso che le statistiche della
International Federation of Robotics parlino di milioni di robot operativi nel mondo, con densità in crescita in tutte le principali economie manifatturiere.
Limiti, sicurezza e futuro dei bracci robotici
Nonostante il loro successo, i bracci robotici hanno limiti chiari. Faticano in compiti che richiedono grande variabilità o capacità di adattamento non strutturata, dove la manualità umana resta imbattibile. Ogni applicazione richiede una progettazione accurata di celle, attrezzaggi, processi, e non esiste un robot "tuttofare" davvero conveniente.
La sicurezza resta un tema centrale. Norme come la
ISO 10218 definiscono criteri stringenti per la progettazione e l'uso dei robot industriali, con particolare attenzione alla valutazione del rischio nelle interazioni uomo macchina. Sul fronte del futuro, la convergenza tra
visione artificiale,
AI e robotica promette bracci più adattivi e autonomi, capaci di gestire lotti sempre più piccoli senza riprogrammazioni infinite. Ma anche in questo scenario, almeno per un bel po', resteranno strumenti specializzati, potentissimi proprio perché progettati per fare molto bene un insieme preciso di lavori.