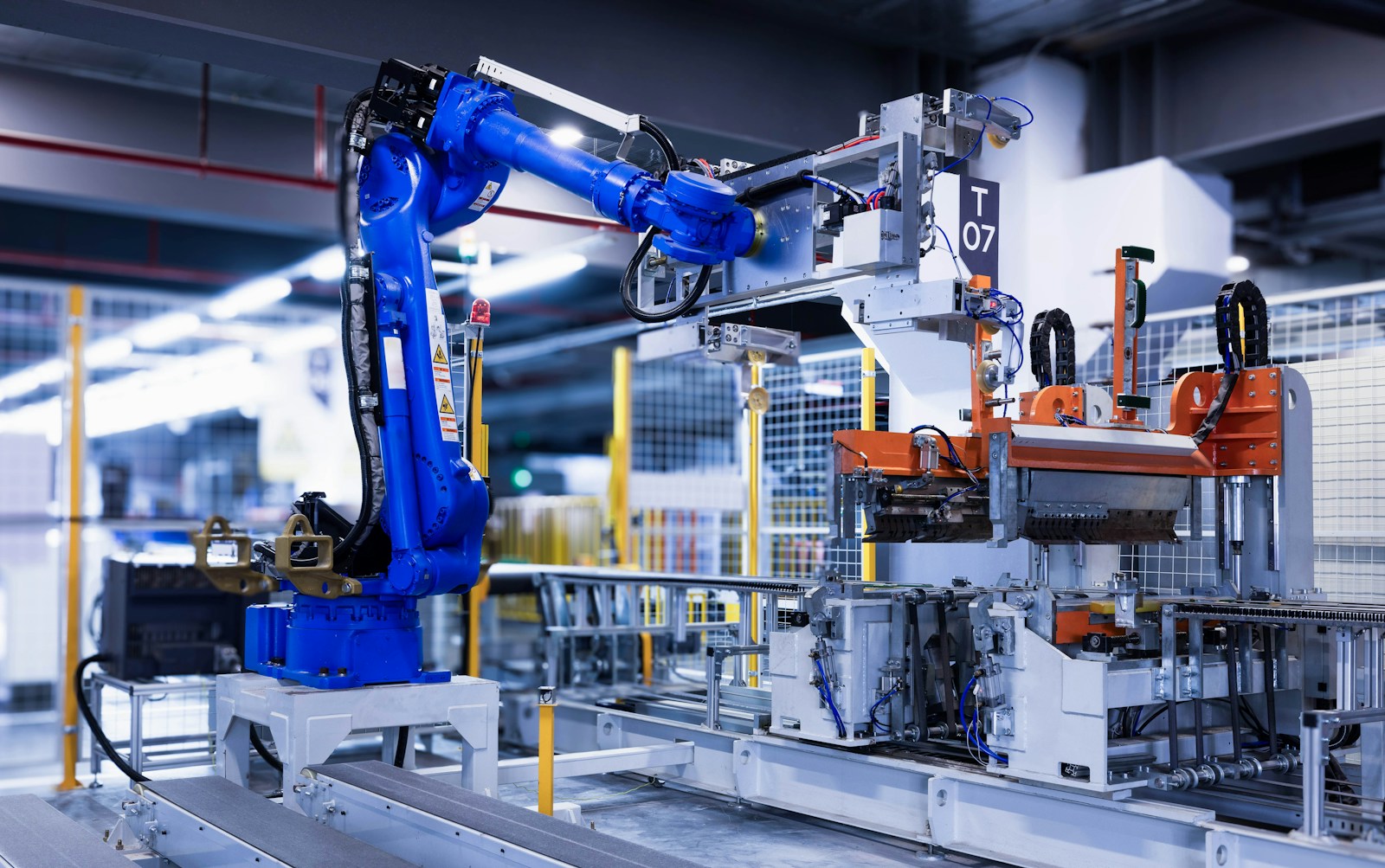
In photos of modern production lines, there is always something that immediately catches the eye: rows of orange, yellow, white
robotic arms moving with choreographic precision. They weld, assemble, move, glue, inspect, never stopping. Understanding what they are, how they work, and why they are everywhere in factories means entering the heart of contemporary industrial automation.
What are robotic arms in the industrial context
A robotic arm refers to a programmable
mechatronic manipulator, designed to move a tool or an end effector in space with repeatable precision. According to the definition by the
International Federation of Robotics, it belongs to the family of industrial robots, just like Cartesian structures, SCARA, or anthropomorphic robots.
Unlike a simple conveyor belt, the robotic arm has multiple degrees of freedom—it rotates, extends, tilts, grasps. It is designed to replace or assist the human arm in repetitive, heavy, or dangerous tasks, maintaining a precision that knows no fatigue. It is this mix of strength, accuracy, and programmability that has made it the star of thousands of production lines.
Mechanical structure: joints, axes, and kinematics
At the core of a robotic arm is a structure made of
rigid segments connected by joints. Each joint represents a controlled axis, driven by electric motors or, in more specialized systems, by pneumatic or hydraulic actuators. A six-axis robot, for example, has mobility comparable to a human arm with shoulder, elbow, and wrist.
The arrangement of the joints defines the robot's
kinematics. Anthropomorphic models aim for maximum flexibility in space, SCARA robots favor rapid movements on a plane with a vertical axis, while Cartesian robots slide on linear X Y Z guides. Each architecture involves trade-offs between work area, speed, payload, and control complexity.
Motors, sensors, and motion control
Inside each joint works an actuator controlled with extreme finesse. State-of-the-art
brushless motors, coupled with precision gearboxes, allow for high torque on movements controlled to a tenth of a degree. Encoders and position sensors provide the controller with the exact status of the arm at every moment.
At the center of the system is a controller that executes servo control algorithms in real time, transforming high-level trajectories and commands into motor currents. Major manufacturers, from
ABB Robotics to
KUKA, and
FANUC, offer proprietary platforms where the robot's programming language interfaces with these low-level controls.
How to program a robotic arm
Programming a robotic arm means teaching it
positions and trajectories to follow. The most classic method is "teach pendant" programming, where the operator manually moves the arm to key positions, which are stored as path points. To these, logical instructions, conditions, wait times, and interactions with other devices are added.
In recent years, more intuitive graphical interfaces and offline programming approaches have also spread, where paths and cycles are defined in simulation software and then downloaded to the machine. Some systems, especially in the world of collaborative
cobots, use direct manual guidance—the arm is taken and moved by hand, while sensors record the path to replicate.
End effector and integration in robotic cells
The arm, by itself, does nothing. The real work happens at the end, in the
end effector. It can be a mechanical gripper, a vacuum system, a welding torch, a glue dispensing head, a deburring tool, a measuring instrument. It is precisely the flexibility to change the end effector that makes the robotic arm an investment adaptable to multiple process stages.
In industrial robotic cells, the arm communicates with conveyors, sensors, vision systems, PLCs, and safety barriers. Designing these cells is a craft in itself, which must balance productivity, safety, and maintenance. Many manufacturers offer function libraries to simplify integration with line control systems and supervisory software.
From traditional robots to collaborative cobots
For decades, robotic arms were confined behind fences and photoelectric barriers, physically separated from operators. The priority was to avoid any contact between man and machine. With the arrival of
collaborative robots, or cobots, a new balance began to be explored. These arms, often more compact, integrate torque sensors, speed limits, and safety logic that allow for work closer to people.
Manufacturers like
Universal Robots have pushed especially on ease of programming and on scenarios where the robot does not replace the operator, but assists them in repetitive or precision tasks. In many cases, the real challenge is not technological, but organizational—rethinking workflows to truly leverage this collaboration.
Why robotic arms are everywhere in factories
The massive presence of robotic arms in factories is not just a matter of technological trend. It is the result of years of evolution on three fundamental fronts: reliability, cost, and flexibility. Modern industrial robots achieve availability levels that make it sustainable for them to work three shifts, every day, for years. Costs, while still significant, have become more accessible thanks to economies of scale.
In many sectors—automotive, electronics, logistics—the pressure on quality and delivery times makes it difficult to do without advanced automation. Robotic arms allow for standardizing delicate stages, reducing errors, and finely measuring cycle time. It is no coincidence that statistics from the
International Federation of Robotics speak of millions of operational robots worldwide, with density growing in all major manufacturing economies.
Limits, safety, and future of robotic arms
Despite their success, robotic arms have clear limits. They struggle with tasks requiring high variability or unstructured adaptability, where human dexterity remains unbeatable. Each application requires careful design of cells, tooling, and processes, and there is no truly cost-effective "do-it-all" robot.
Safety remains a central theme. Standards like
ISO 10218 define stringent criteria for the design and use of industrial robots, with particular attention to risk assessment in human-machine interactions. On the future front, the convergence of
artificial vision,
AI, and robotics promises more adaptive and autonomous arms, capable of handling ever smaller batches without endless reprogramming. But even in this scenario, at least for a good while, they will remain specialized tools, extremely powerful precisely because they are designed to do a specific set of jobs very well.